
Partikel Filter (UDACITY)
Lernbeispiel zum Tracking mittels Partikel Filter, Übersetzung von python nach MatLab

Diplomarbeit
Simulation und Regelung einer elektromechanischen Wankstabilisierung, Co-Simulation (MKS & Simulink), Simulation Bordnetzstabilität
Semesterarbeit
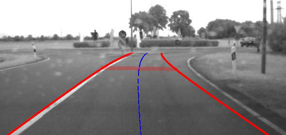
Visualisierung des Fahrschlauches in einem Kamerabild eines Fahrzeuges, Reibwertschätzung und Bremswegvisualisierung, Visualisierung für Teleoperation
Semesterarbeit
Parameterschätzung mit Künstlich Neuronalen Netzen
Lane Detection & Tracking
Fahrspurerkennung durch Kantendetektion und Fahrspurtracking mittels simpler Partikel-Filter
Machine Learning, Stanford University
Online-Kurs zum Thema Machine Learning, Angebot der Stanford University auf www.coursera.org

CS373: Artificial Intelligence
Online-Kurs zum Thema Artificial Intelligence (Programming a Robotic Car), Angebot von www.udacity.com

ST101: Intro to Statistics
Online-Kurs zum Thema Einführung in die Statistik (datenbasierte Entscheidungsfindung), Angebot von www.udacity.com
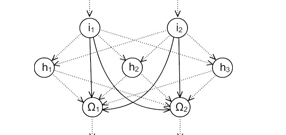
Tracking mit Partikel Filter
Lokalisierung und Tracking eines Roboters mit LIDAR-ähnlichen Sensoren mittels Partikel-Filter

Sensor-Modell (LIDAR, Ultraschall, etc.)
vereinfachtes Sensor-Modell zur Simulation eines Entfernungsmessungs-Sensors (LIDAR, Ultraschall, etc.)
GraphSLAM (UDACITY)
Lernbeispiel zur Simultanen Lokalisierung und Kartenerstellung mittels GraphSLAM, Übersetzung von python nach MatLab

A-Star Algorithmus
Pfadplaung mit A-Star Algorithmus in Matlab mit unterschiedlichen Heuristiken
Dynamic Programming Algorithmus
Pfadplanung mittels Dynamischer Programmierung in MatLab für beliebigen Start-Knoten




